
RSS 2019 Workshop
Pervasively neural-dynamic robotics
Do insights from neuroscience, cognitive science, and neuromorphic engineering lead to a radically new vision?
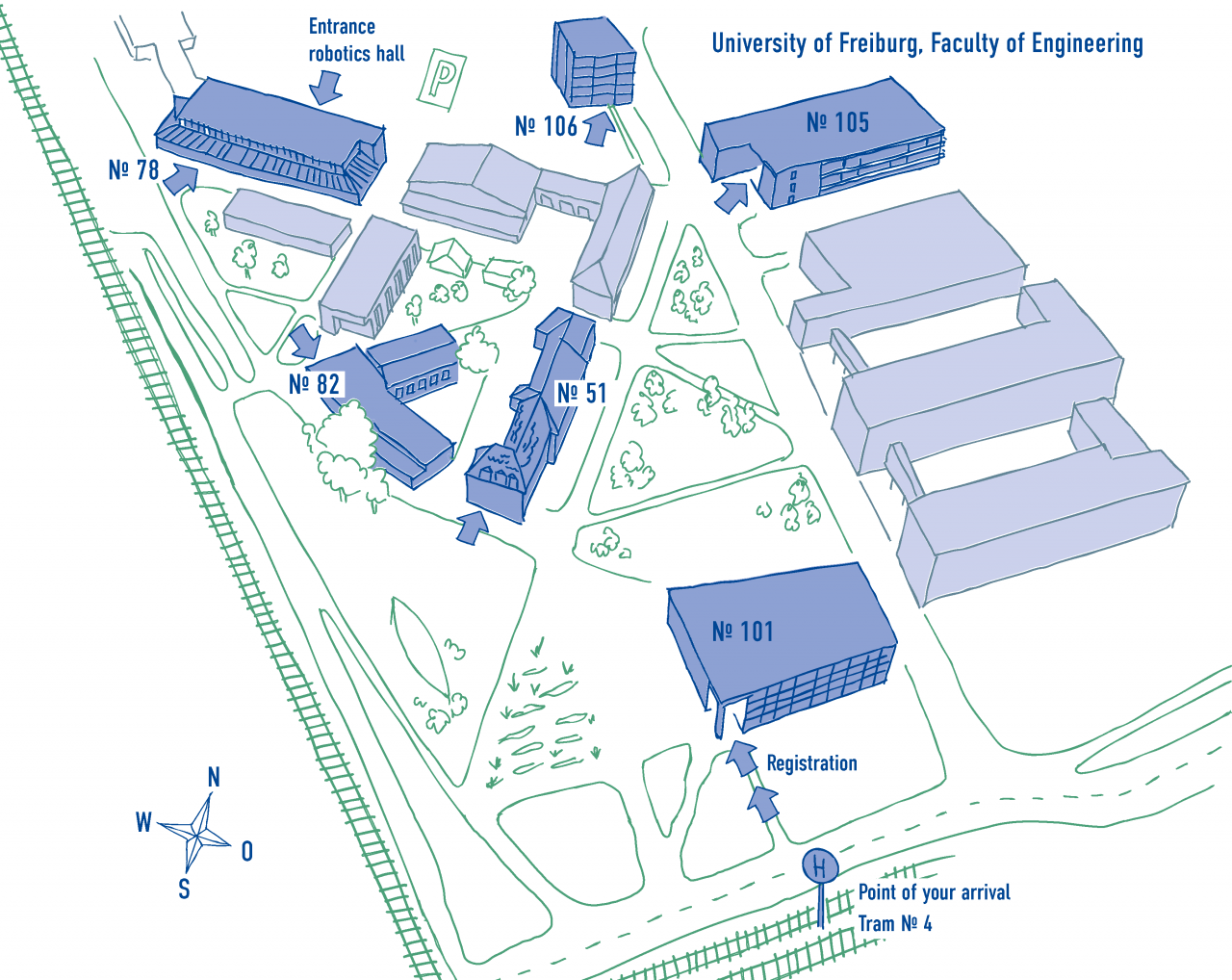
Workshop held at the Robotics Science and Systems (RSS) conference, June 23 (afternoon) in Freiburg/Germany*
*Faculty of Engineering of the University of Freiburg, Georges-Koehler-Allee (not at "Messe Freiburg" where the main conference will take place)
While substantial progress is being made in cognitive robotics, many of us feel that systems now on the horizon will still be a far cry from the original vision of AI as general human-like intelligence acting in the real world. The key limitation may be the lack of autonomy, the ability of a system to behave intelligently in a broad set of situations without the need for specific programming for each task or for a specific learning regime for each new setting. The classical roadblock of linking cognitive architectures to the world through perception, motor control, and background knowledge is being shifted by powerful methods of neurally inspired machine learning and probabilistic reasoning. But, at their core, today's cognitive robots are still driven by conventional algorithmic frameworks that integrate diverse mathematical methods into what resembles classical cognitive architectures. Is that fact a key obstacle to true autonomy of behavior, cognition, and learning?
A radical alternative is to abandon the hybrid approach and seek pervasively neural systems that use no conventional forms of information processing. Such systems would instead generate activation patterns linked to sensors, motors, and neural memory systems and may ultimately be implemented directly in neuromorphic hardware. Early success were achieved for low-level robotic systems that were largely input driven. Recent progress in neural dynamics may unlock cognition for such systems by enabling the generation of activation patterns from within the neural networks, not primarily from input. Dynamic instabilities then generate sequences of activation states to perform cognitive operations.
Our goal in the workshop is to critically discuss roadblocks toward autonomy of neuronal architectures. We will bring together diverse ideas toward a vision of pervasively neural cognitive processing. We will lay out a road-map for such a radical neural vision of autonomous intelligence.
List of topics
- neuronal architectures for perception, cognition, and motor control
- neurorobotics
- neuromorphic hardware in robotics
- autonomy of neural-network based systems
- neuronal cognitive architectures
Invited Speakers

Arren Glover
Neuromorphic Technology for Robotics IIT Central Research Labs, Genoa, ItalyTalk title: Event-based computing architectures in robotics

Paul Verschure
Synthetic, Perceptive, Emotive and Cognitive Systems (SPECS), Institute of Bioengineering of Catalonia, SpainTalk title: Building robotic architectures that organize behavior based on drives and motivations

Florentin Wörgötter
Bernstein Center, Department of Computational Neuroscience, 3rd Physics Institute, Georg-August-Universität Göttingen, GermanyTalk title: Trying to transfer human action- and object semantics to machines. Does this work

Xinyun Zou
Cognitive Anteater Robotics Laboratory (CARL) led by Prof. Jeff Krichmar, University of California, Irvine, USATalk title: Neuronal robotic controllers
Talks and discussion will be organized around these questions:
- What does autonomy in behavior, cognition, and learning mean in your field? What are obstacles to such autonomy?
- Is system integration by conventional programming a limiting factor for autonomy? Is a new theoretical approach to or language for integration needed? Should it be neural?
- What would a vision of pervasively neural processing for autonomous agents look like? What would make such a vision attractive? What problem must be solved for such a vision to become viable?
We will have a two break-out/demo sessions, in which all contributors will show demos or 'live' simulators that illustrate the points they made and architectures they developed. In these sessions, we will break into smaller groups distributed within the lecture hall and have direct interaction with the participants, enabling them to question and to try out some of the elements of neural computation that are discussed in the lectures.
Organisers

Yulia Sandamirskaya
Institute of Neuroinformatics, University of Zurich and ETH Zurich, SwitzerlandTalk title: Autonomy and architectures for visual perception

Gregor Schöner
Institut für Neuroinformatik, Ruhr-Universität Bochum, GermanyTalk title: Building neural dynamic architectures that generate higher cognition from sensory-motor grounding
Location
Georges-Köhler-Allee 101
79110 Freiburg
Workshop WS2-6 in building 82
Room 00 006
Program (preliminary)
| Time | Topic | Speaker | Talk |
|---|---|---|---|
| 13:00 - 13:30 | Radical neural vision for autonomous intelligence: the neural-dynamic perspective | Gregor Schöner | download |
| 13:30 - 14:00 | Building robotic architectures that organize behavior based on drives and motivations | Paul Verschure | |
| 14:00 - 14:30 | Radical neural vision for autonomous intelligence: the neuromorphic perspective | Yulia Sandamirskaya | download |
| 14:30 - 15:00 | Coffee break | ||
| 15:00 - 16:00 | Demos/interactive sessions and posters | ||
| 16:00 - 16:30 | Event-based computing architectures in robotics | Arren Glover | download |
| 16:30 - 17:00 | Neuronal robotic controllers | Xinyun Zou | download |
| 17:00 - 17:30 | Panel discussion | ||
| 17:30 - 17:40 | Concluding remarks |